Nvidia Jetson Nano介绍与使用指南
[toc]

本文介绍了Nvidia Jetson Nano的硬件参数、性能、使用方法及个人主观的使用体验。
1. Jetson简介
Jetson Nano是Nvidia在TX2和Xavier获得成功后推出的低配版GPU运算平台。我在Jetson Nano 2019年3月刚上市的时候就入手了一块开发套件(英国Pimoroni购入,110磅)。这次乘着短暂的假期,来补一下对它的评测。谈一个硬件平台,首先绕不开的就是它的纸面参数。在官方的资料上,Jetson Nano公布的参数如下:
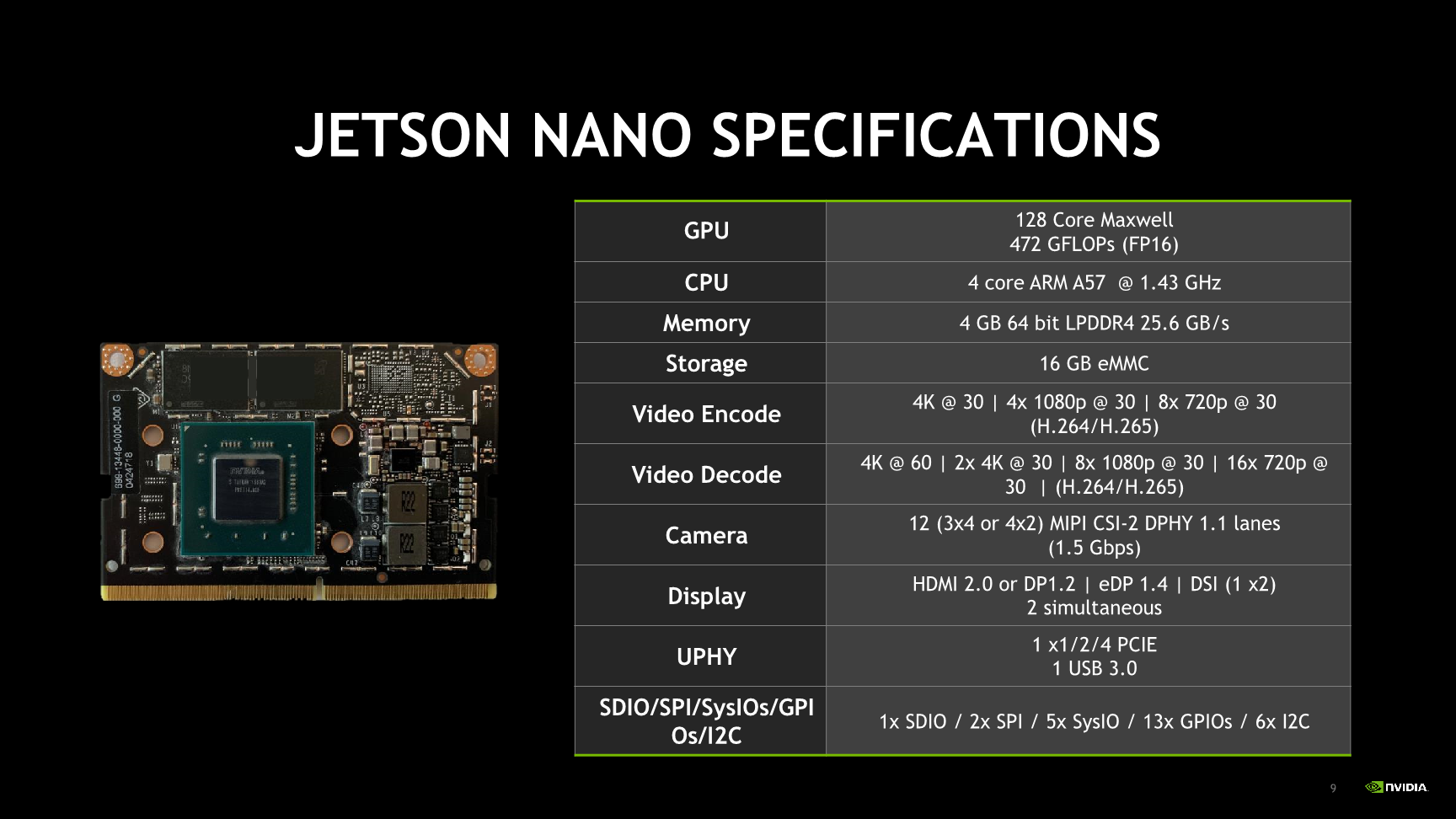
Nano最大的特色就是包含了一块128核Maxwell架构的GPU,虽然已经是几代前的架构,不过因为用于嵌入式设备,从功耗、体积、价格上也算一个平衡。Nano的计算能力不高,勉强可以使用一些小规模、并且优化过的网络进行推理,训练的话还是不够用的。A53的CPU中规中矩,隔壁的树莓派4已经升级为A72。4GB的内存并不能完全使用,因为其中有一部分(1GB左右)是和显存共享的。Jetson Nano的最大优势还是在体积上,它采用核心板可拆的设计,核心板的大小只有70 x 45 mm,可以很方便的集成在各种嵌入式应用中。同时它的功耗也非常低,有两种模式:
- 5W(低功耗模式;可以使用USB口供电)
- 10W(必须使用Power Jack外接5V电源供电)
这两种模式可以在系统菜单中进行修改。当使用Power Jack供电时,外接电源要求5V=2A, 推荐使用5V=4A以应对峰值。如果没有安装风扇,只使用自带的散热片被动散热的话,建议强制5W模式,否则一定死机。
Jetson Nano Developer Kit的整体做工十分好,符合Nvidia的一贯质量,这里分享几个图片:
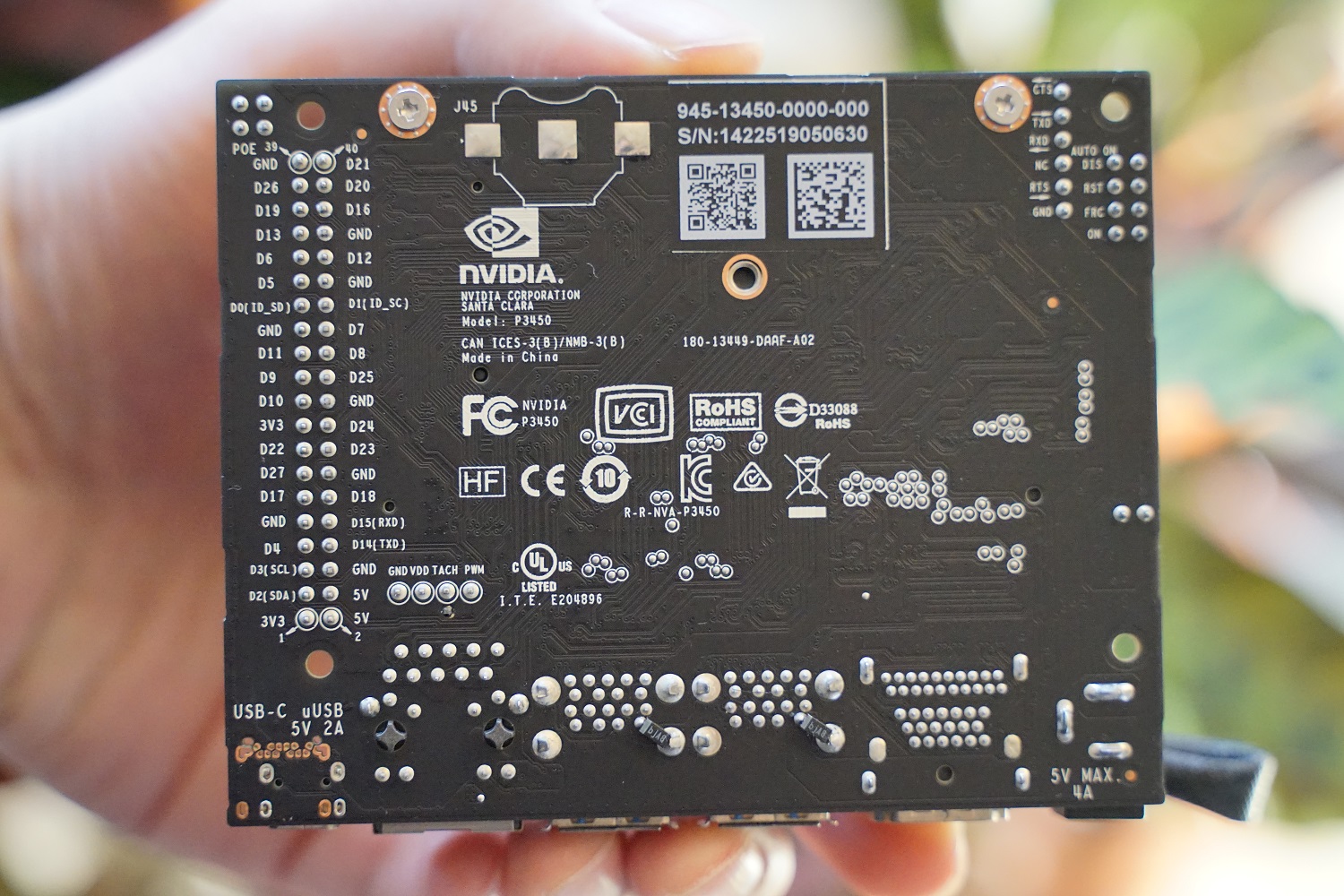
▲ Jetson Nano开发套件的背面,可见做工十分精良 ▲
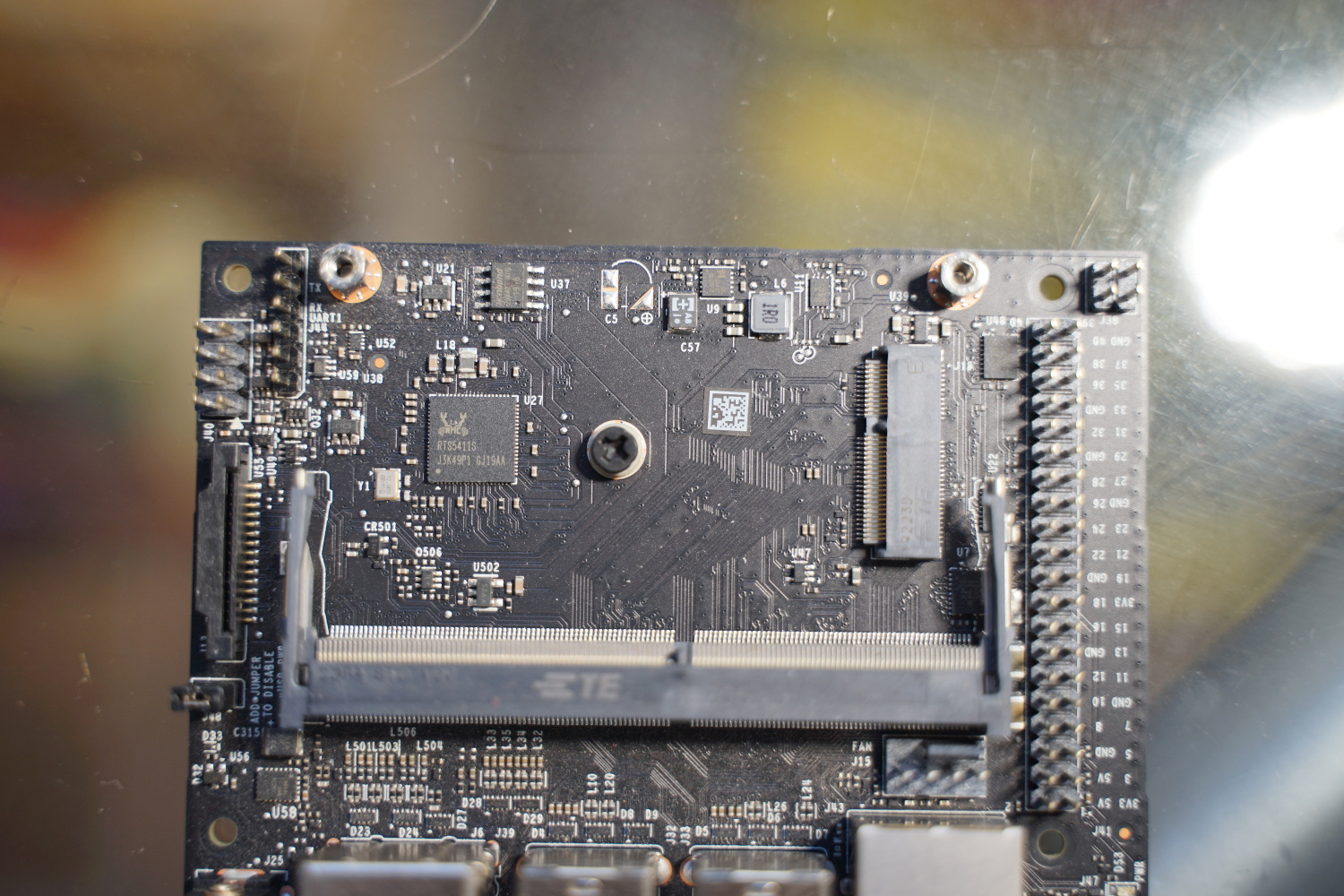
▲ Jetson Nano套件的核心板为可拆卸设计,将主板拆卸后会露出一路M.2接口的单路PCIE,可接无线网卡 ▲

▲ Jetson Nano核心板的背面,也是安装SD卡的位置 ▲
Jetson Nano的硬件布局如下 (对应A02版本; B01版本除了电源按钮接口和额外一路CSI外,其他布局基本相同):
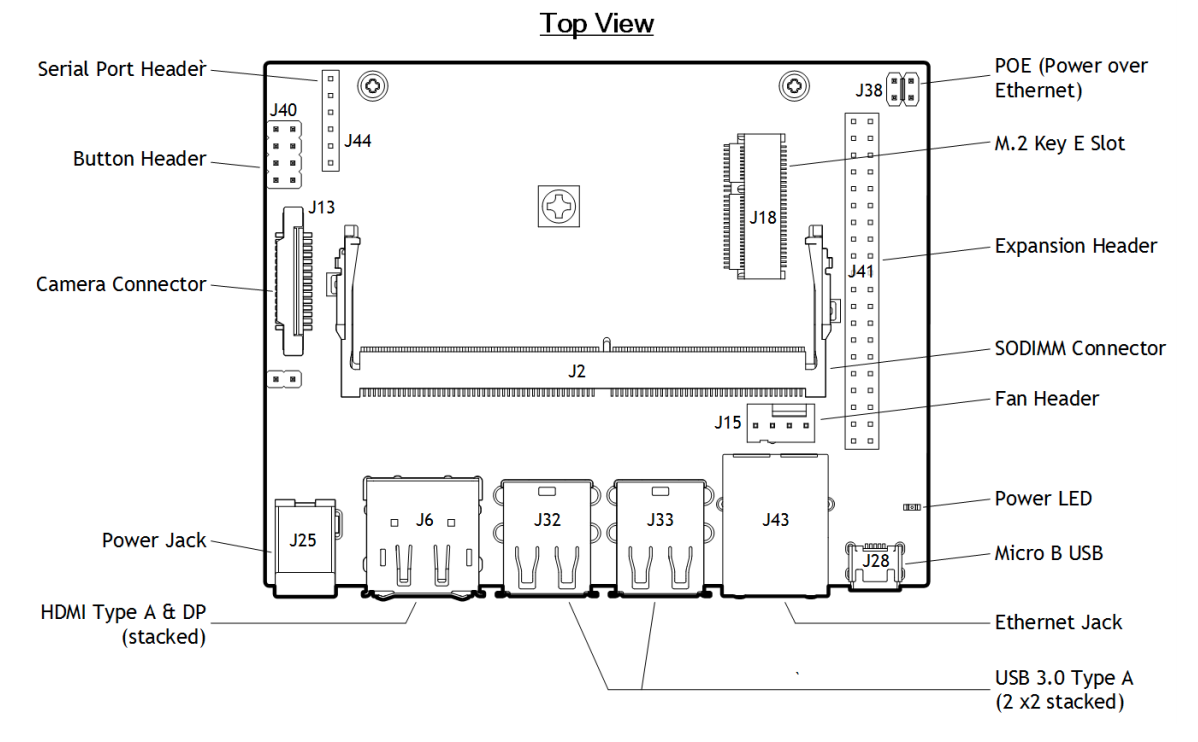
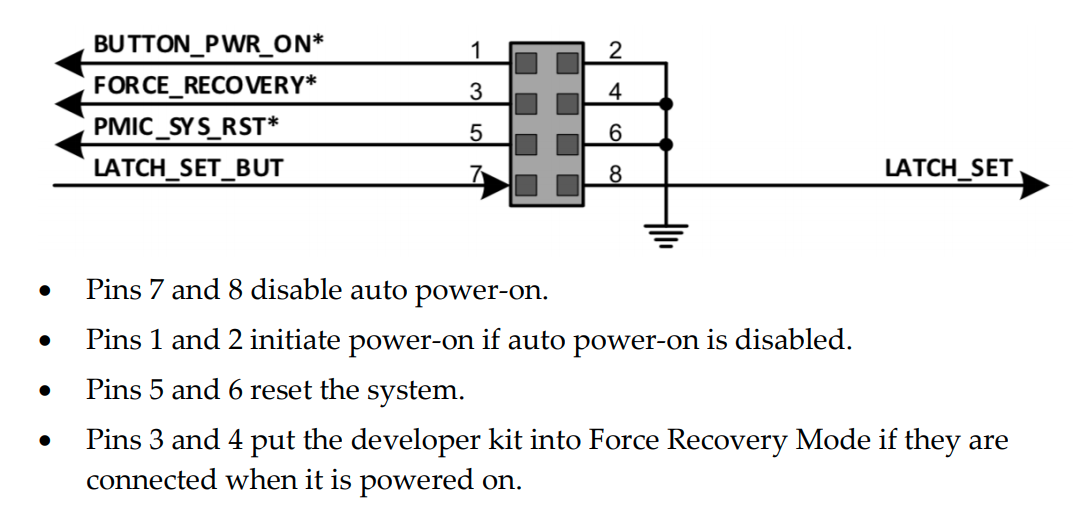
值得注意的是,Jetson Nano除了之前提到的核心板分离式设计(J2),还包括了一个M.2接口,可以用来外接无线网卡。除此之外,Jetson Nano有与树莓派兼容的外设接口(J41);风扇接口(J15);摄像头接口(J13);以及USB和HDMI。另外J40是按键接口,类似PC主板上的接口,各个接口的说明如下,不用的话直接悬空:
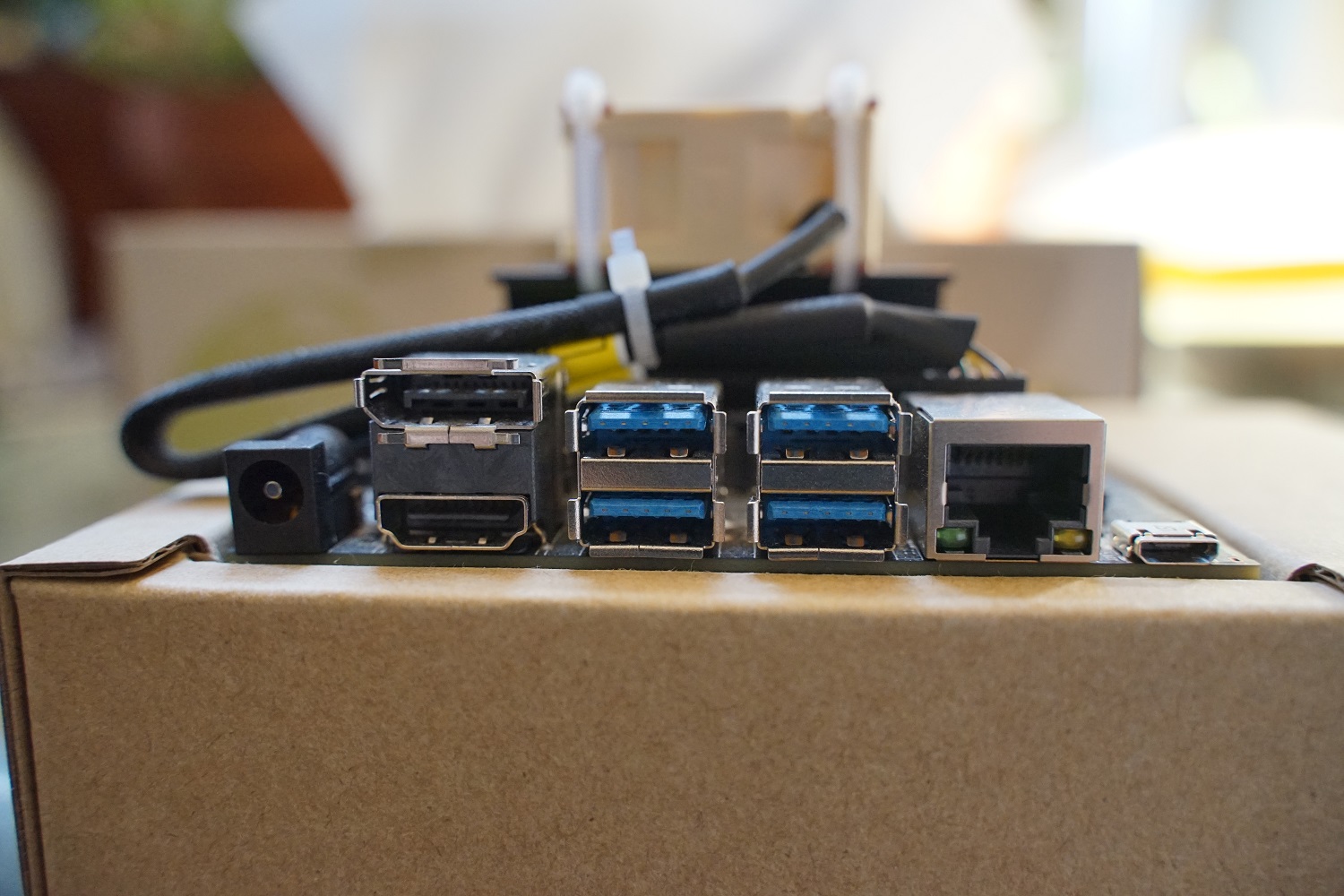
▲ Jetson Nano的外设接口,从左至右分别为:电源接口、HDMI、DisplayPort、USB、以太网接口及USB供电接口 ▲
Jetson Nano在上个月(2020年10月)新推出了2GB版本,内存从4GB降为2GB,4个USB3.0变为USB 3.0 x 1 + USB 2.0 x 2 + USB 2.0 Micro x 1,其他参数不变,但价格降为4GB版本的一半。这次降价的主要目的还是为了和类似的硬件平台(如树莓派4)进行竞争。本文基于Jetson Nano 4GB版本,但因为2GB版本使用完全相同的核心和系统,所以内容同样适用于2GB版本。
2. Jetson系列性能与参数对比
Jetson整个系列型号的对比如下:
| Jetson Nano (4GB) | Jetson TX1 | Jetson TX2/TX2i | Jetson Xavier | Jetson Xavier Nx | |
|---|---|---|---|---|---|
| CPU (ARM) | 4-core ARM A57 @ 1.43 GHz | 4-core ARM Cortex A57 @ 1.73 GHz | 4-core ARM Cortex-A57 @ 2 GHz, 2-core Denver2 @ 2 GHz | 8-core ARM Carmel v.8.2 @ 2.26 GHz | 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU |
| GPU | 128-core Maxwell @ 921 MHz | 256-core Maxwell @ 998 MHz | 256-core Pascal @ 1.3 GHz | 512-core Volta @ 1.37 GHz | 384-core NVIDIA Volta™ GPU |
| Memory | 4 GB LPDDR4, 25.6 GB/s | 4 GB LPDDR4, 25.6 GB/s | 8 GB 128-bit LPDDR4, 58.3 GB/s | 16 GB 256-bit LPDDR4, 137 GB/s | 8 GB 128-bit LPDDR4x @ 1600 MHz51.2GB/s |
| Storage | MicroSD | 16 GB eMMC 5.1 | 32 GB eMMC 5.1 | 32 GB eMMC 5.1 | 16 GB eMMC 5.1 |
| Tensor cores | – | – | – | 64 | 48 |
| Video encoding | (1x) 4Kp30, (2x) 1080p60, (4x) 1080p30 | (1x) 4Kp30, (2x) 1080p60, (4x) 1080p30 | (1x) 4Kp60, (3x) 4Kp30, (4x) 1080p60, (8x) 1080p30 | (4x) 4Kp60, (8x) 4Kp30, (32x) 1080p30 | 2x464MP/sec (HEVC)2x 4K @ 30 (HEVC)6x 1080p @ 60 (HEVC)14x 1080p @ 30 (HEVC) |
| Video decoding | (1x) 4Kp60, (2x) 4Kp30, (4x) 1080p60, (8x) 1080p30 | (1x) 4Kp60, (2x) 4Kp30, (4x) 1080p60, (8x) 1080p30 | (2x) 4Kp60, (4x) 4Kp30, (7x) 1080p60 | (2x) 8Kp30, (6x) 4Kp60, (12x) 4Kp30 | 2x690MP/sec (HEVC)2x 4K @ 60 (HEVC)4x 4K @ 30 (HEVC)12x 1080p @ 60 (HEVC)32x 1080p @ 30 (HEVC)16x 1080p @ 30 (H.264) |
| USB | (4x) USB 3.0 + Micro-USB 2.0 | (1x) USB 3.0 + (1x) USB 2.0 | (1x) USB 3.0 + (1x) USB 2.0 | (3x) USB 3.1 + (4x) USB 2.0 | |
| PCI-Express lanes | 4 lanes PCIe Gen 2 | 5 lanes PCIe Gen 2 | 5 lanes PCIe Gen 2 | 16 lanes PCIe Gen 4 | 1 x1 + 1x4(PCIe Gen3, Root Port & Endpoint) |
| Power | 5W / 10W | 10W | 7.5W / 15W | 10W / 15W / 30W | 10W / 15W |
可见Jetson Nano在整个系列中性能最低,但同时其也是其中价格和功耗最低的。也就是说,Jetson Nano更适合使用在算力要求较低的边缘嵌入式AI设备中。举几个我能想到的例子:小型移动机器人、人脸签到打卡、口罩识别、智能门锁、智能音箱等等。
官方给出了常见CNN模型在使用TensorRT下得出的帧率(FP16, batch size = 1):
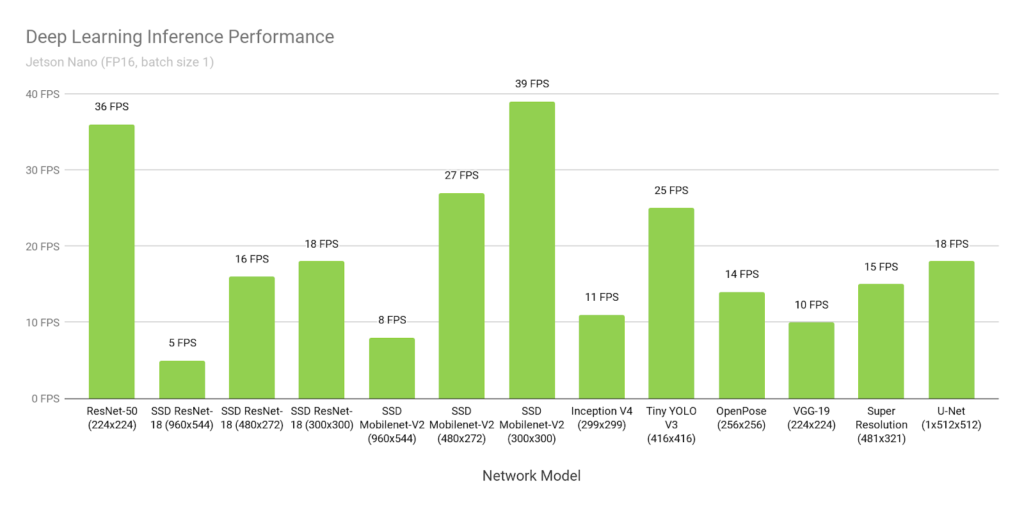
可见大部分模型为可用状态(FPS > 10),其中ResNet、Mobilenet和Tiny Yolo性能优异,可以达到30帧,已经可以用于移动场景了。注意这里使用的是Nvidia自己优化的TensorRT,而不是标准的Tensor库。Nvidia没有公布太多具体的细节,但是提到使用了kernel auto-tuning、dynamic tensor memory、layer fusion和quantization (FP16/INT8) 等方法来加速网络的执行效率,这点还是非常优秀的。
3. Getting Started
好,做完了基本的介绍,接下来就是一些使用前的准备工作。
3.1 安装风扇
Jetson Nano在使用的时候一定要用一个风扇压一下,不然会因为被动散热能力不够而频繁死机。我用的是Noctua NF-A4x20 5V PWM。散热片的上方有四个安装风扇的固定孔,需要用自攻螺丝固定。我这里为了不造成破坏,用了四个捆扎带固定风扇。
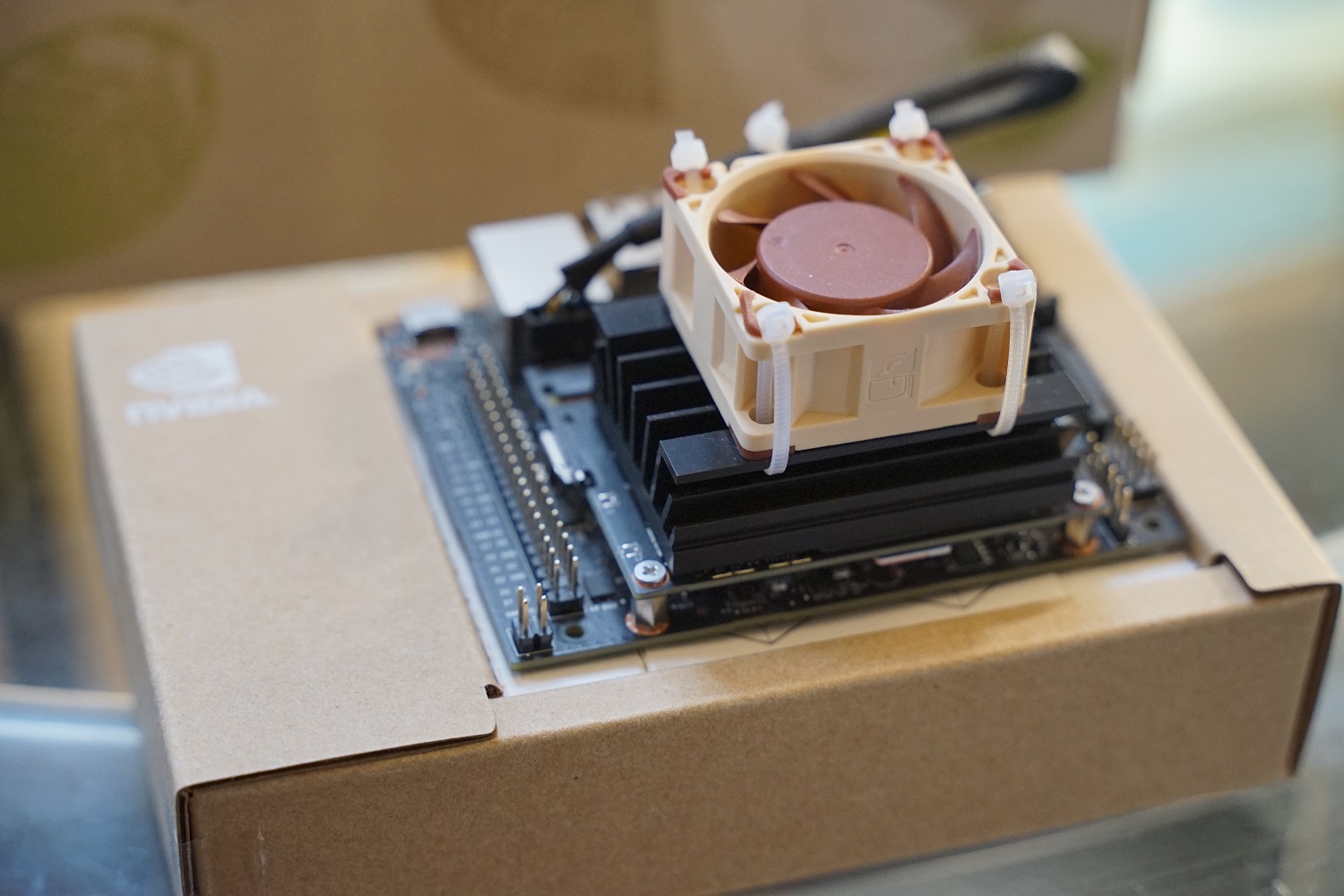
▲ Jetson Nano安装Noctua 5v风扇 ▲
注意:风扇刚接上去不会转,要等温度到达一定值后才会启动。
3.2 安装无线网卡
Jetson机身只有Ethernet有线网络,不包括无线网卡,使用的时候有时候不是很方便。官方推荐使用的AC8265这款2.4G/5G双模网卡,同时支持蓝牙4.2。我这里使用的是微雪AC8265网卡 + 天线套件:

安装过程非常简单,将核心板拆卸开,露出M2接口,然后将网卡插入,用一个螺丝固定即可:
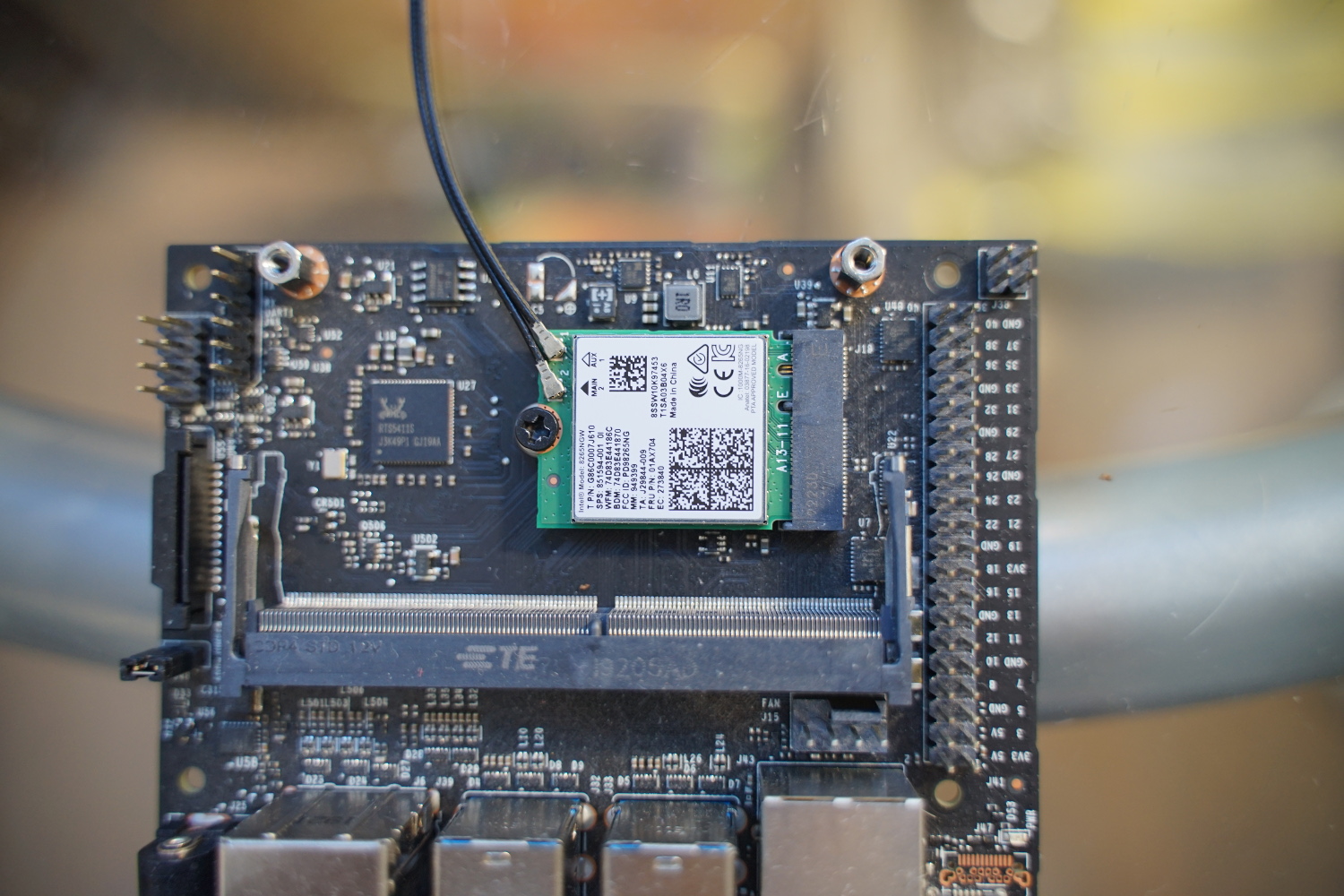
▲ 为Jetson Nano安装无线网卡 ▲
这款网卡的驱动已经集成在Jetson中,无需额外安装,进入系统后就可以直接搜索WiFi使用了。
3.3 安装摄像头
Jetson包含CSI相机接口(A01有一路;B02版本有两路),可以接树莓派摄像头(基于MX219),相机接口在如下位置(安装时注意接口的正反,信号触点面朝里):
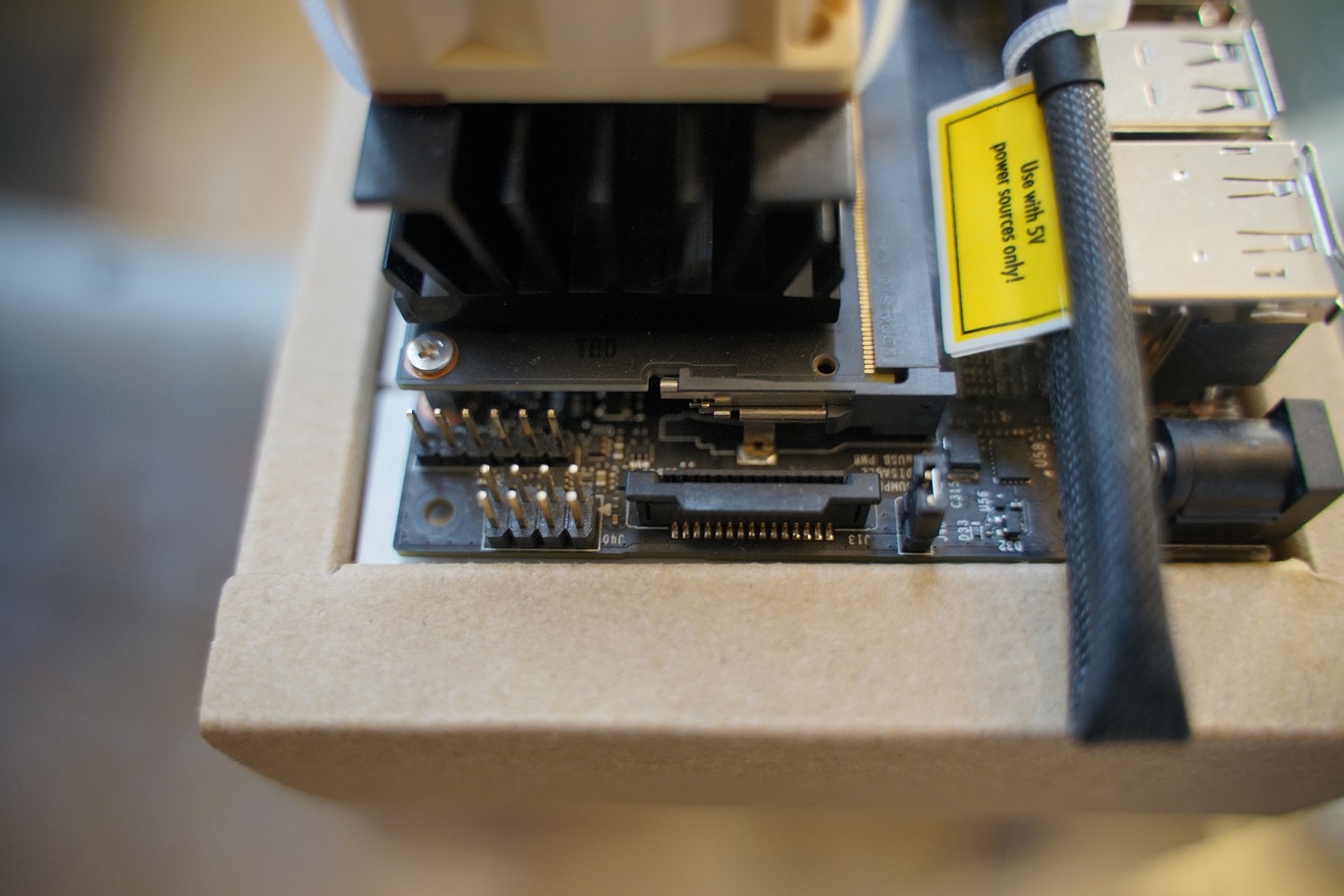
▲ Jetson Nano CSI相机接口及电源按钮接口 ▲
摄像头连接好后可以通过以下指令测试是否工作:
gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM),width=3820, height=2464, framerate=21/1, format=NV12' ! nvvidconv flip-method=0 ! 'video/x-raw,width=960, height=616' ! nvvidconv ! nvegltransform ! nveglglessink -e
当然除了使用CSI接口的摄像头外,也可以使用USB连接网络摄像头。
3.4 安装外壳
这么贵重的电路板还是建议使用一个外壳保护一下的。虽然有些外壳的安装步骤较为繁琐,但是可以有效的防止电路板受到损坏,还是值得的。淘宝上有很多选择,但英国这里可选的余地有限(也很贵),最后买了以下这款全金属外壳:

▲ Jetson Nano安装好后外壳后的样子。我选的这款金属外壳含电源按钮、天线固定口和相机支架 ▲
注:Jetson Nano随带的纸盒可以折叠成一个简单的底座,也可以凑合使用。
3.5 配置系统
- 前往官网下载image (https://developer.nvidia.com/embedded/learn/get-started-jetson-nano-devkit#write)
- 将下载的image烧录至SD卡 (使用SD烧录软件,如Etcher)
- 连接鼠标、键盘、网络、LCD
- 上电并等待启动,不出意外的话会看见Ubuntu的桌面系统
- 更新系统:
$ sudo apt upgrade
整个安装过程和树莓派一样。因为使用Ubuntu系统,对SD卡的容量要求较高,需要大约15GB的空间。我用了64GB的,但是32GB也没有问题。不过16GB的卡可能不行,我配置完成已经占用了15GB了,还没有考虑之后需要配置环境以及下载DNN模型。如果需要节省空间,可以把内置的Libre Office给卸了:
$ sudo apt-get purge libreoffice*
$ sudo apt-get clean
3.6 安装jtop
jtop是一款开源软件,可以查看Jetson Nano的运行状态,推荐使用。jtop的GitHub链接为:https://github.com/rbonghi/jetson_stats
安装方法是: $ sudo -H pip install -U jetson-stats
3.7 使用VNC远程桌面访问Jetson(可选)
如果觉得连接屏幕使用不方便的话,也可以使用VNC实现headless远程桌面访问Jetson Nano. 需要的步骤是:
- 修改配置:
$ sudo nano /usr/share/glib-2.0/schemas/org.gnome.Vino.gschema.xml
在最后一个”</key>“之后,”</schema>“之前,添加:
<key name='enabled' type='b'>
<summary>Enable remote access to the desktop</summary>
<description>
If true, allows remote access to the desktop via the RFB
protocol. Users on remote machines may then connect to the
desktop using a VNC viewer.
</description>
<default>false</default>
</key>
- 编译配置:
$ sudo glib-compile-schemas /usr/share/glib-2.0/schemas - 添加运行脚本:
$ nano ~/openvino#!/bin/bash export DISPLAY=:0 gsettings set org.gnome.Vino enabled true gsettings set org.gnome.Vino prompt-enabled false gsettings set org.gnome.Vino require-encryption false /usr/lib/vino/vino-server & - 添加执行权限:
$ chmod +x ~/openvino - 之后通过VNC软件,如Remmina / RealVNC,就可以连接Nano了。
- 如果需要改变屏幕分辨率,可以通过以下命令:
$ xrandr --fb 1920x1080
4. Jetson开发资源
我们用Jetson进行开发的初衷就是希望通过使用GPU,实现更丰富的AI计算功能。Jetson为此提供了很好的开发套件,称为JetPack。JetPack (当前最新版本为JetPack 4.3)支持全Jetson系列模块,包括Jetson AGX Xavier, Jetson TX2/TX1以及Jetson Nano. JetPack已经包含在了官方发布的Image中,无需另外安装。JetPack目前主要包括以下组件:
- TensorRT和cuDNN:用于高性能深度学习应用
- CUDA:用于GPU加速计算等应用
- Multimedia API package:用于相机相关的应用及传感器驱动开发
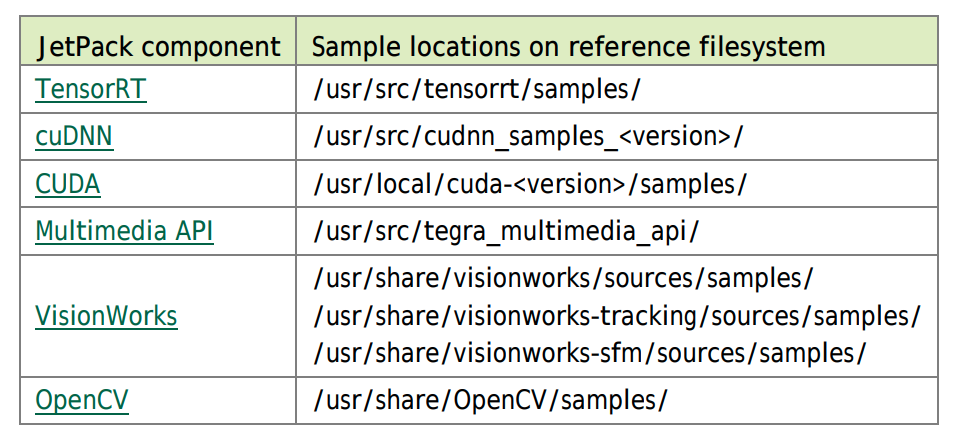
- VisionWorks和OpenCV:用于计算机视觉开发
相关的示例可以在以下文件夹里找到:
关于JetPack的更多内容可见: https://www.developer.nvidia.com/embedded/jetpack
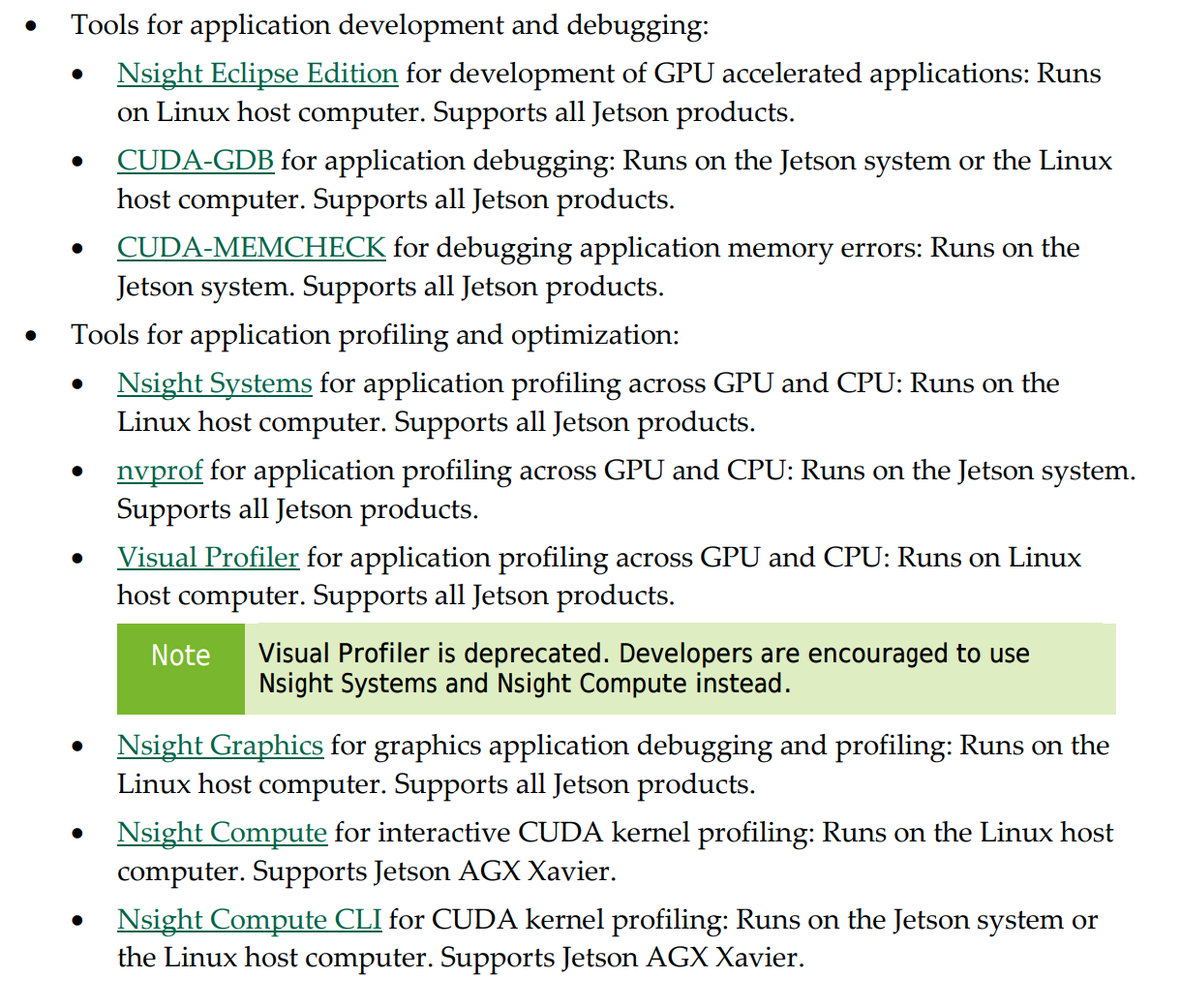
除了JetPack,Nvidia还提供了以下开发工具:
除此之外,官网上还能找到很多Jetson的相关资源:
- Nvidia Developer
- Jetson Nano User Guide
- Online Course: Getting Started with AI on Jetson Nano
- Explore at Jetson Projects
这里涉及到的内容很多,无法铺开来说。这些开发工具中最有用的还是OpenCV和TensorRT了,有了这两个基本上就能满足80%的开发需要了。除此之外比较有意思的还有用于机器人的NVIDIA Isaac SDK和用于视频分析的NVIDIA DeepStream SDK,但是目前对Nano的支持还很有限,可以持续关注一下。
5. 运行Jetson Inference
为了体验Jetson的功能,我们使用Jetson Inference示例。Jetson Inference是官方推出的示例教程之一(Tutorial: Hello, AI world)。整个安装流程如下(安装时间较长,需耐心等待):
# download the repo
$ git clone --recursive https://github.com/dusty-nv/jetson-inference
$ cd jetson-inference
# configure build tree
$ mkdir build
$ cd build
$ cmake ../
# build and install
$ make -j$(nproc)
$ sudo make install
$ sudo ldconfig
安装过程中,会弹出提示,可以根据需要下载所需的预训练DNN模型。整个安装完成后,就可以体验Jetson Nano的示例了。这个Tutorial包含了以下三个示例:
Inference Example 1. Classifying Images with ImageNet

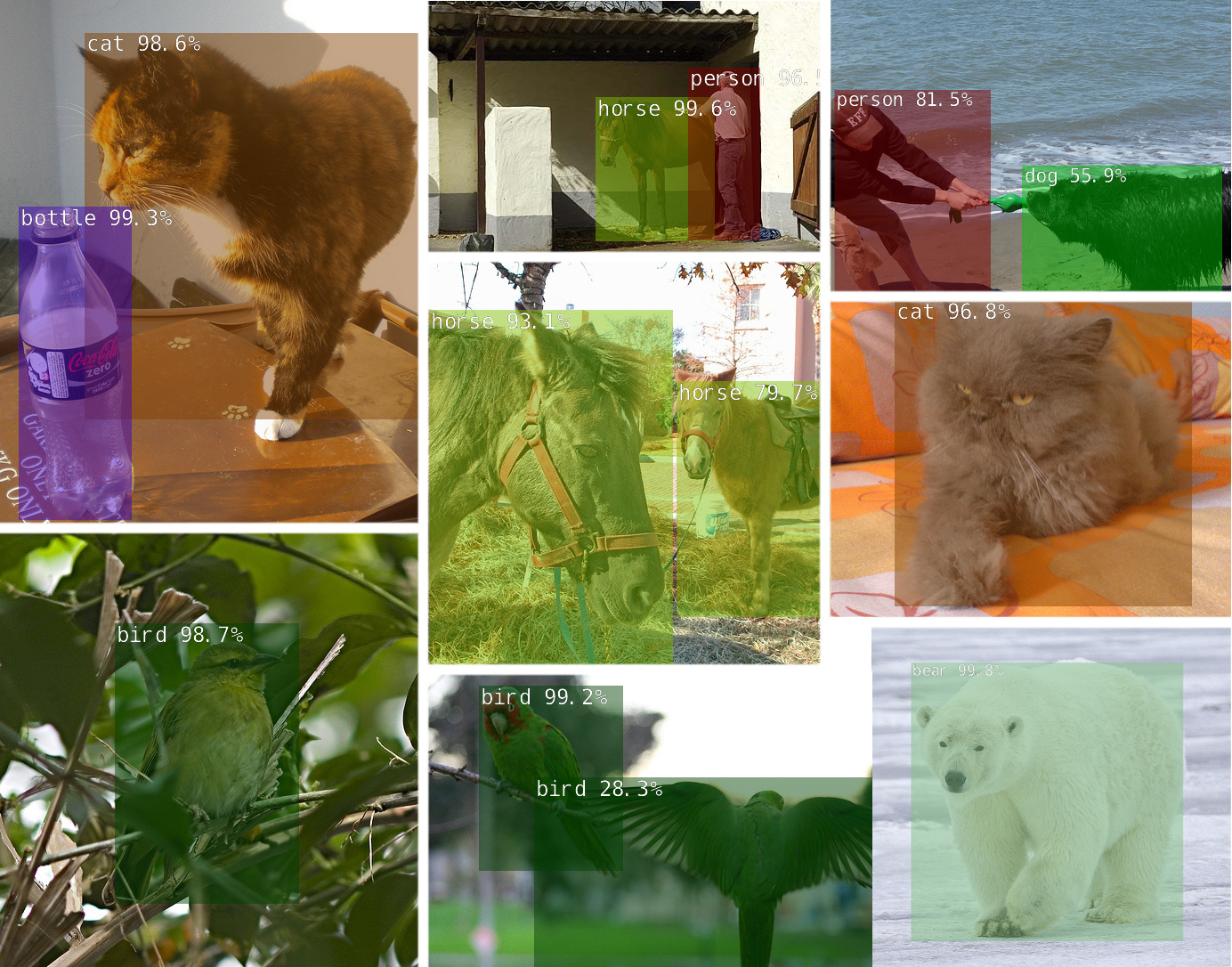
Inference Example 2. Locating Objects with DetectNet
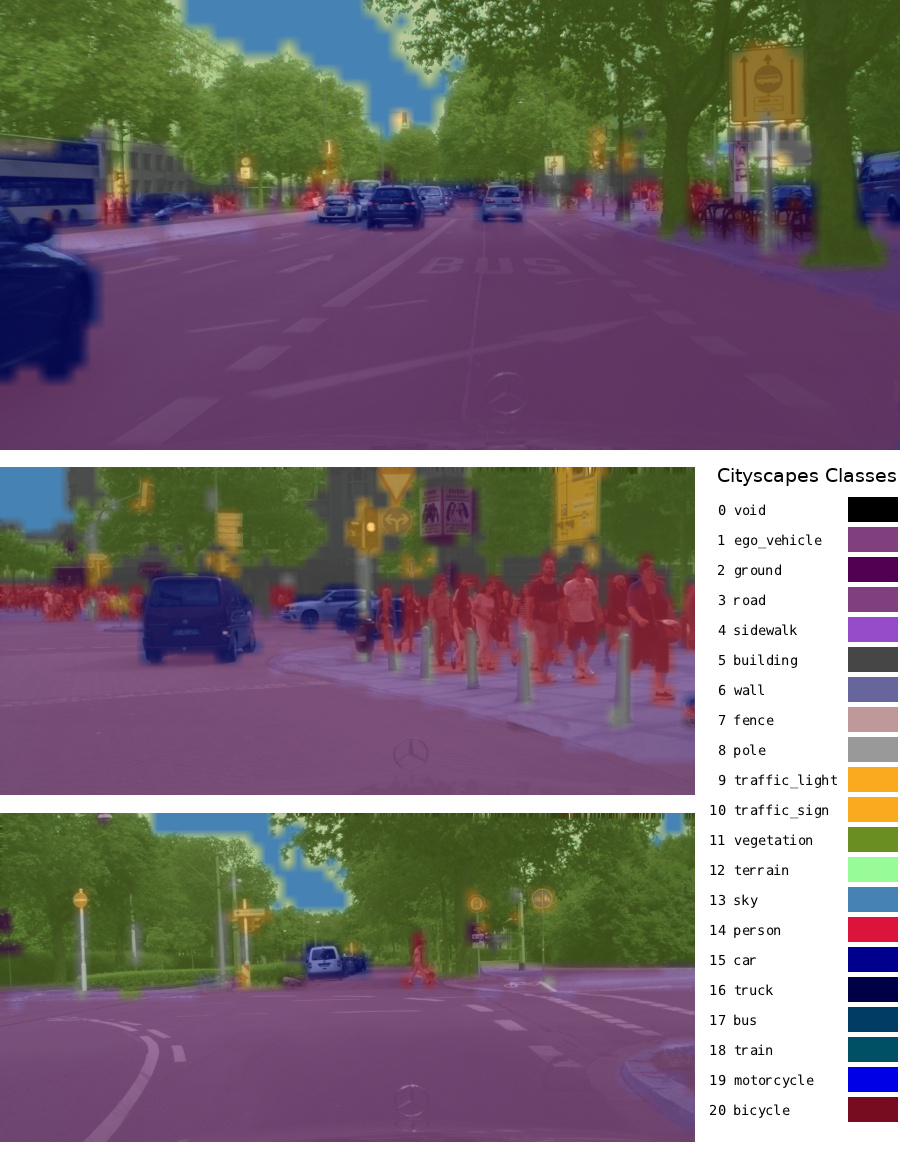
Inference Example 3. Semantic Segmentation with SegNet
除此之外还包含了若干如何Training的教学,感兴趣的朋友自行前往阅读。
6. 结语
在使用了这么长的时间后,我觉得Jetson Nano的主要用处还是实现一些简单的实时视觉识别,适合一些对体积、功耗、价格有要求却需要AI功能的项目中,其余的大部分功能相比树莓派并没有明显优势,反倒问题很多(初期项目资源非常少、经常发烫死机、系统稳定性不如Raspbian、只有有线网卡、对电源要求高等)。我认为Jetson Nano的定位应该属于“入门级的边缘AI计算”,比较适合想要在现有系统的基础上增加一些深度学习功能的场景,也适合想要学习嵌入式AI部署的深度学习开发人员。想要成为主流的AI开发平台(代替高端的TX2和Xavier或者取代低端的AI芯片,如K210),Nvidia还有很长的路要走。但是作为机器人控制平台,Jetson Nano还是有比较多的可玩性的。我之后应该会利用Jetson Nano平台做一些机器人相关的应用,敬请期待。
参考资料:
- Nvidia, L4T - Jetson
- Nvidia Developer, Tutorial: Hello, AI world
- Nvidia, TensorRT Documentation
- Nvidia, cuDNN Documentation
- Nvidia, CUDA Documentation
- Nvidia, CUDA Profiling
- Nvidia Developer, VisionWorks
- CAVEDU, Jetson Nano新旧版本差异 - A02 vs B01